Overview

Marking of industrial robot systems
Industrial robot systems range from small cobots to mobile robots to large plants, e.g. in automotive manufacturing. For labelling, to all of them the same legal and standard requirements apply. These are, for example, markings…

Cybersecurity for the safety of industrial robots
According to the ISO 10218-1:2025 and ISO 10218-2:2025 standards, industrial robots shall have protective measures against cyber threats, in addition to a number of new requirements. According to experts, manufacturers are currently working flat out…

Reuse of industrial robots
Industrial robots are often given a second life. Due to changed production requirements, industrial robot systems are often converted or dismantled just a few years after initial commissioning. The existing robots are usually not scrapped….
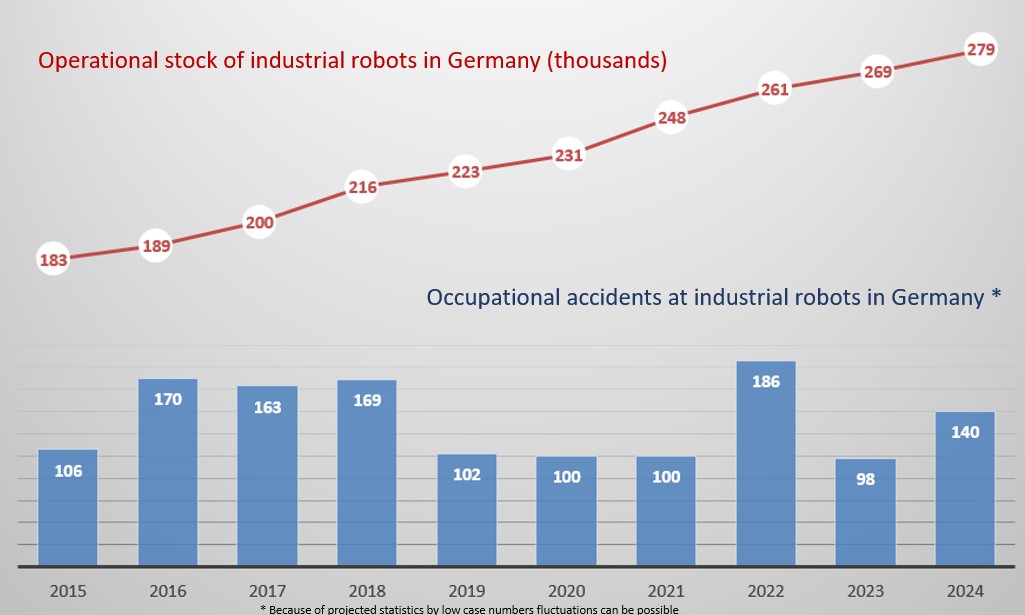
Accident numbers for industrial robots again at low level
Despite the continuous increase in industrial robots in Germany, the number of occupational accidents involving industrial robots recorded by the German Occupational Accident Insurance (DGUV) remains at low level. In 2024, for example, 140 reportable*…

How to measure Cobots?
Collaborative robots (Cobots) are provided for a human machine collaboration. Additional safeguards like fences or light grids may be widely dispensable. If a contact between robot and human happens: How much force or pressure is…

Normal stop
Already the 1989 edition of the European Machinery Directive said: Despite an E-Stop a so-called Normal Stop is required. However, until now the Standards für industrial robots payed not much attention to this fact. The…
Note: This webpage is a translation of German websites